utils.h File Reference
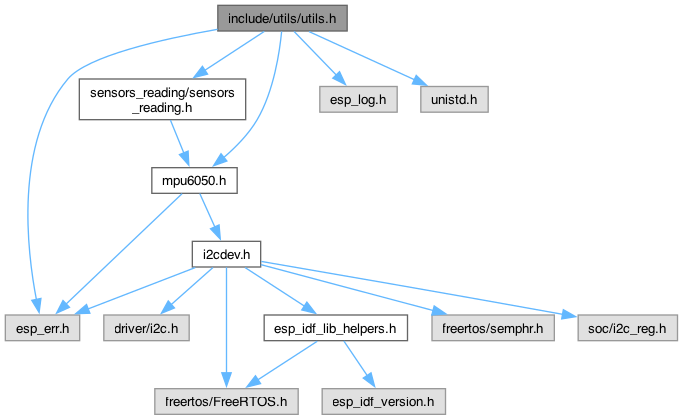
#include "mpu6050.h"#include "sensors_reading/sensors_reading.h"#include <esp_err.h>#include <esp_log.h>#include <unistd.h>
Include dependency graph for utils.h:
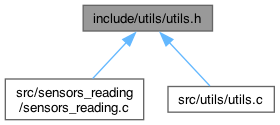
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| float | calculate_vertical_speed (float current_altitude, float last_altitude, int64_t current_ms, int64_t last_ms) |
| Calculate the vertical speed of the rocket in meters per second (m/s). | |
| esp_err_t | format_log_line (char *line_buf, size_t buff_size, int64_t ms, ROCKET_STATUS_T rocket_status, int32_t pressure, float altitude, float vertical_speed, float temperature, mpu6050_acceleration_t acc, mpu6050_rotation_t rot) |
| Format the line that will be printed into the SD card file. This file contains all the flight recorded data. | |
Function Documentation
◆ calculate_vertical_speed()
| float calculate_vertical_speed | ( | float | current_altitude, |
| float | last_altitude, | ||
| int64_t | current_ms, | ||
| int64_t | last_ms ) |
Calculate the vertical speed of the rocket in meters per second (m/s).
- Parameters
-
current_altitude last recorded altitude in meters. last_altitude previous recorded altitude in meters. current_ms current miliseconds since system boot. last_ms miliseconds since system boot where the last_altitude was recorded.
- Returns
- float vertical speed of the rocket in meters per second (m/s).
Here is the caller graph for this function:

◆ format_log_line()
| esp_err_t format_log_line | ( | char * | line_buf, |
| size_t | buff_size, | ||
| int64_t | ms, | ||
| ROCKET_STATUS_T | rocket_status, | ||
| int32_t | pressure, | ||
| float | altitude, | ||
| float | vertical_speed, | ||
| float | temperature, | ||
| mpu6050_acceleration_t | acc, | ||
| mpu6050_rotation_t | rot ) |
Format the line that will be printed into the SD card file. This file contains all the flight recorded data.
- Parameters
-
line_buf pointer to the buffer where the line will be written. buff_size size of the buffer string in bytes. ms milliseconds from system bootup where the data was recorded. rocket_status rocket status. pressure recorded pressures. altitude recorded altitude. vertical_speed calculated vertical speed. temperature recorded temperature. acc recorded acceleration. rot recorded rotation speed.
- Returns
- esp_err_t ESP_OK on success.
< esp_err_t value indicating success (no error)
Here is the caller graph for this function:
