sensors_reading.h File Reference
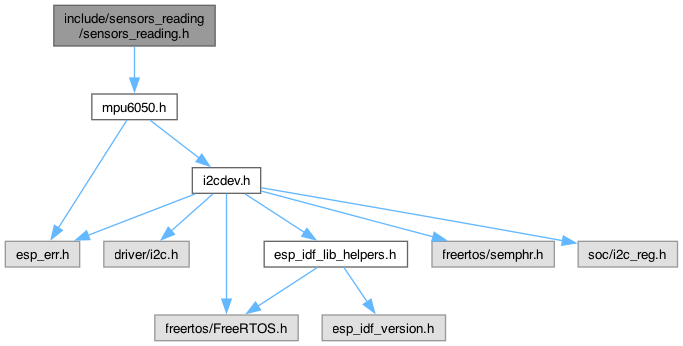
#include "mpu6050.h"
Include dependency graph for sensors_reading.h:
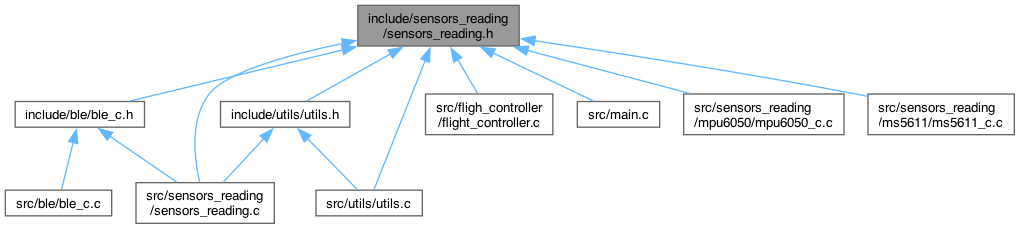
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | SensorDataQueue_t |
| Data packet structure for passing sensor readings between tasks. More... | |
Macros | |
| #define | ACTIVATE_MPU6050 1 |
| Enable MPU6050 sensor for linear acceleration and angular rotation. | |
| #define | ACTIVATE_MS5611 1 |
| Enable MS5611 pressure and temperature sensor. | |
| #define | ACTIVATE_SD 1 |
| Enable SD card logging for saving flight data. | |
| #define | ACTIVATE_BLE 1 |
| Enable BLE control and telemetry transmission. | |
| #define | I2C_SCL_IO 22 |
| I2C bus configuration for sensor communication with MS5611 and MPU6050. | |
| #define | I2C_SDA_IO 21 |
| #define | I2C_NUM I2C_NUM_0 |
| #define | I2C_FREQ_HZ 400000 |
| #define | TAG_SENSORS_READING "Sensors Reading" |
Enumerations | |
| enum | ROCKET_STATUS_T { PREPARING_FOR_FLIGHT , READY_TO_FLY , ASCENDING , DESCENDING_WITH_DROGUE , DESCENDING_WITH_MAIN , LANDED } |
| Rocket flight status states. More... | |
Functions | |
| void | sensors_reading () |
| Main FreeRTOS task function for reading all sensors. | |
Macro Definition Documentation
◆ ACTIVATE_BLE
| #define ACTIVATE_BLE 1 |
Enable BLE control and telemetry transmission.
◆ ACTIVATE_MPU6050
| #define ACTIVATE_MPU6050 1 |
Enable MPU6050 sensor for linear acceleration and angular rotation.
◆ ACTIVATE_MS5611
| #define ACTIVATE_MS5611 1 |
Enable MS5611 pressure and temperature sensor.
◆ ACTIVATE_SD
| #define ACTIVATE_SD 1 |
Enable SD card logging for saving flight data.
◆ I2C_FREQ_HZ
| #define I2C_FREQ_HZ 400000 |
◆ I2C_NUM
| #define I2C_NUM I2C_NUM_0 |
◆ I2C_SCL_IO
| #define I2C_SCL_IO 22 |
I2C bus configuration for sensor communication with MS5611 and MPU6050.
◆ I2C_SDA_IO
| #define I2C_SDA_IO 21 |
◆ TAG_SENSORS_READING
| #define TAG_SENSORS_READING "Sensors Reading" |
Enumeration Type Documentation
◆ ROCKET_STATUS_T
| enum ROCKET_STATUS_T |
Rocket flight status states.
Enumerates the possible phases of the rocket's flight sequence.
Function Documentation
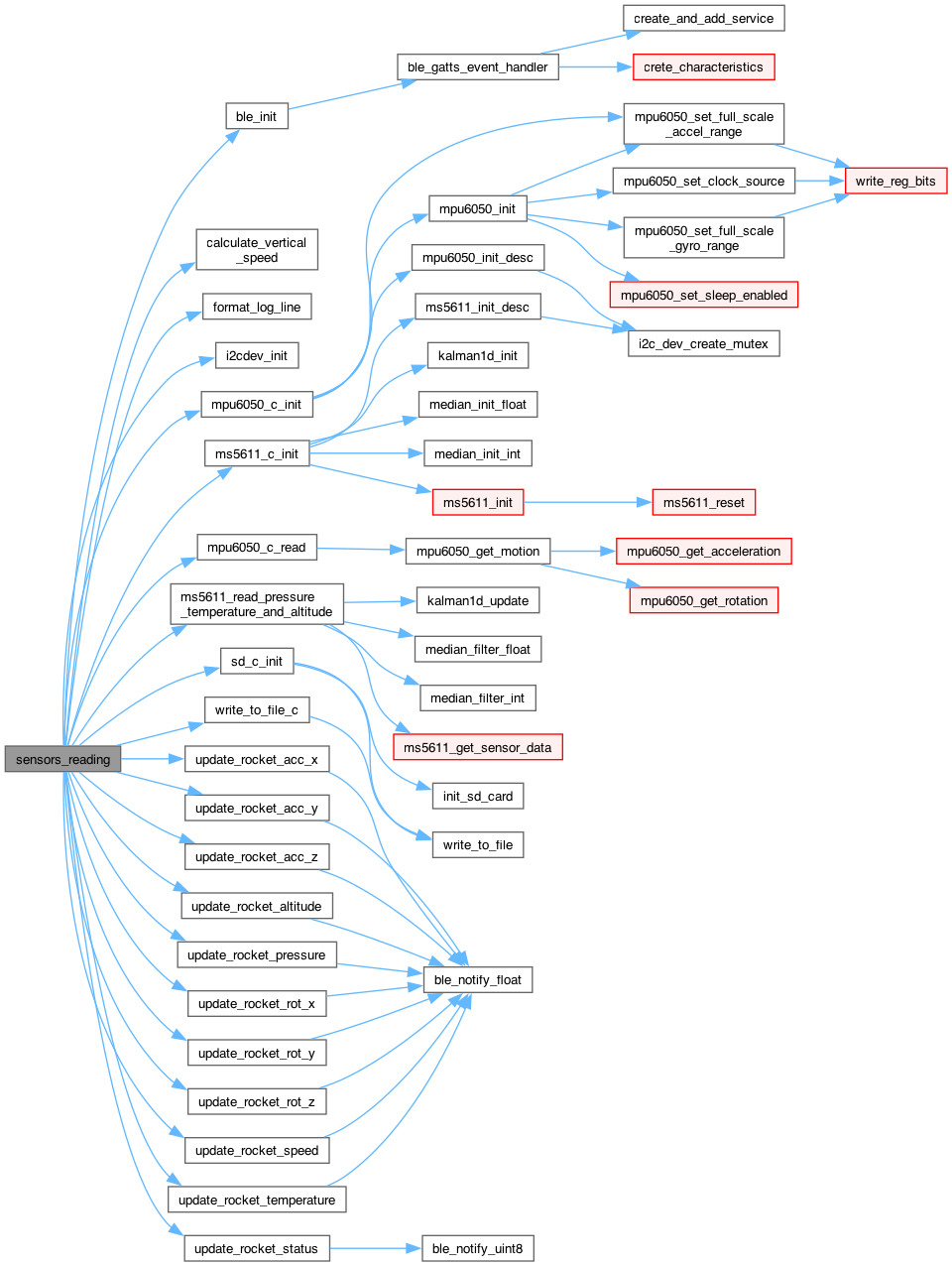
◆ sensors_reading()
| void sensors_reading | ( | ) |
Main FreeRTOS task function for reading all sensors.
Initializes peripherals, reads sensor data in an infinite loop and pushes new data into the queue to notify the flight controller.
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)
Here is the call graph for this function:
Here is the caller graph for this function:
