sensors_reading.c File Reference
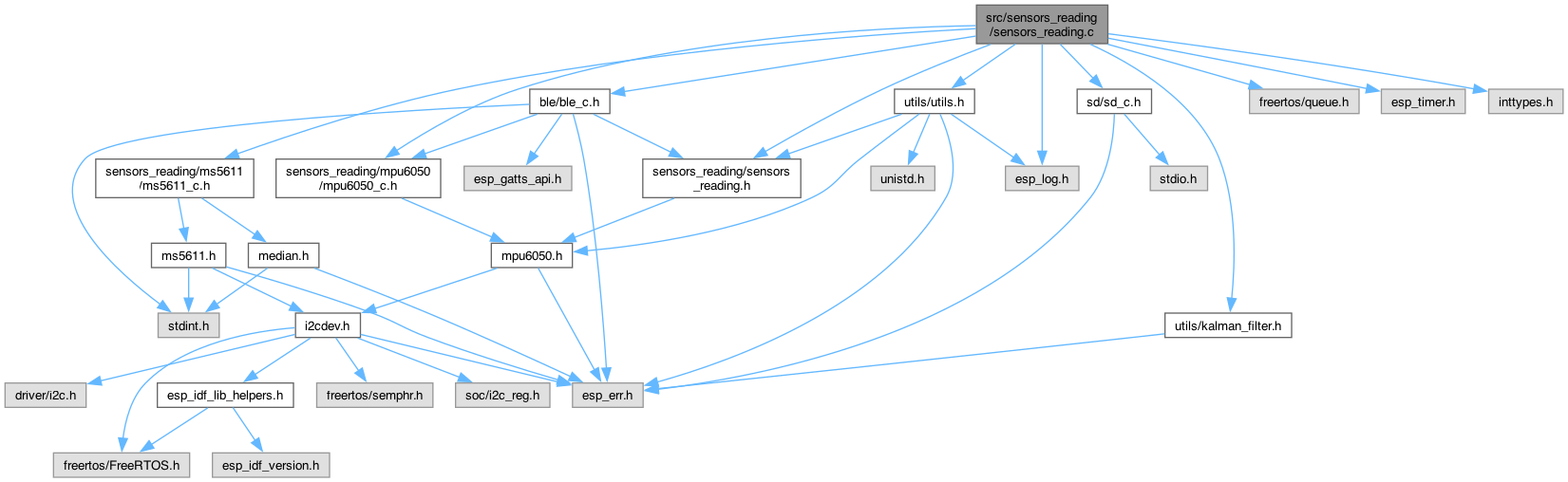
#include "sensors_reading/sensors_reading.h"#include "ble/ble_c.h"#include "sd/sd_c.h"#include "sensors_reading/mpu6050/mpu6050_c.h"#include "sensors_reading/ms5611/ms5611_c.h"#include "utils/kalman_filter.h"#include "utils/utils.h"#include "freertos/queue.h"#include <esp_log.h>#include <esp_timer.h>#include <inttypes.h>
Include dependency graph for sensors_reading.c:
Functions | |
| void | sensors_reading () |
| Main FreeRTOS task function for reading all sensors. | |
Variables | |
| ms5611_t | ms5611 |
| mpu6050_dev_t | mpu6050 = {0} |
| FILE * | logFile = NULL |
| ROCKET_STATUS_T | rocket_status = PREPARING_FOR_FLIGHT |
| mpu6050_acceleration_t | rocket_accel = {0} |
| mpu6050_rotation_t | rocket_rot = {0} |
| int32_t | rocket_pressure |
| float | rocket_temperature |
| float | rocket_altitude |
| float | rocket_speed |
| QueueHandle_t | xSensorQueue |
| QueueHandle_t | xUpdatedStatusFromFlightController |
| ROCKET_STATUS_T | buff_rocket_status |
Function Documentation
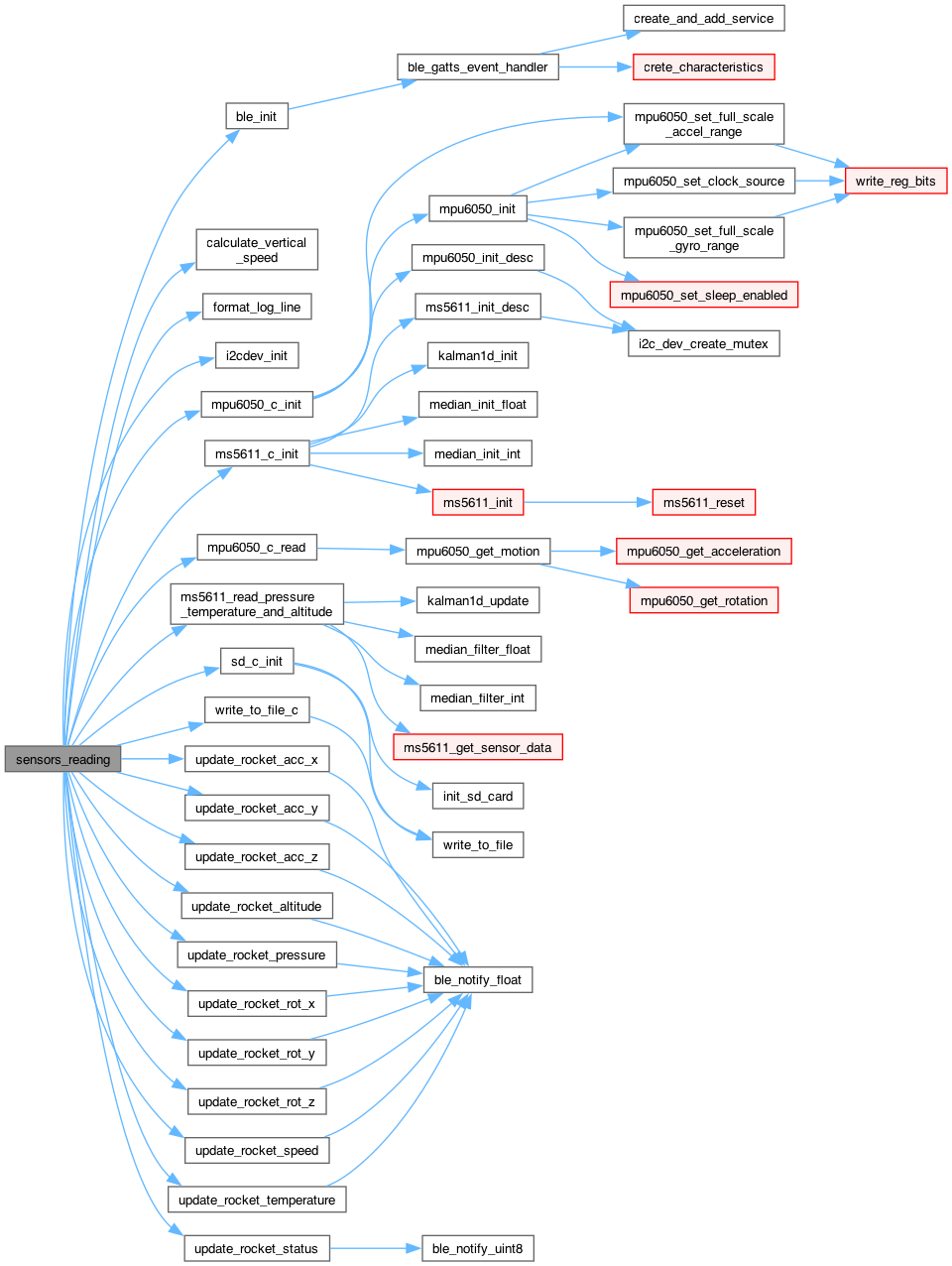
◆ sensors_reading()
| void sensors_reading | ( | ) |
Main FreeRTOS task function for reading all sensors.
Initializes peripherals, reads sensor data in an infinite loop and pushes new data into the queue to notify the flight controller.
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)
Here is the call graph for this function:
Here is the caller graph for this function:

Variable Documentation
◆ buff_rocket_status
| ROCKET_STATUS_T buff_rocket_status |
◆ logFile
| FILE* logFile = NULL |
◆ mpu6050
| mpu6050_dev_t mpu6050 = {0} |
◆ ms5611
| ms5611_t ms5611 |
◆ rocket_accel
| mpu6050_acceleration_t rocket_accel = {0} |
◆ rocket_altitude
| float rocket_altitude |
◆ rocket_pressure
| int32_t rocket_pressure |
◆ rocket_rot
| mpu6050_rotation_t rocket_rot = {0} |
◆ rocket_speed
| float rocket_speed |
◆ rocket_status
| ROCKET_STATUS_T rocket_status = PREPARING_FOR_FLIGHT |
◆ rocket_temperature
| float rocket_temperature |
◆ xSensorQueue
|
extern |
◆ xUpdatedStatusFromFlightController
|
extern |