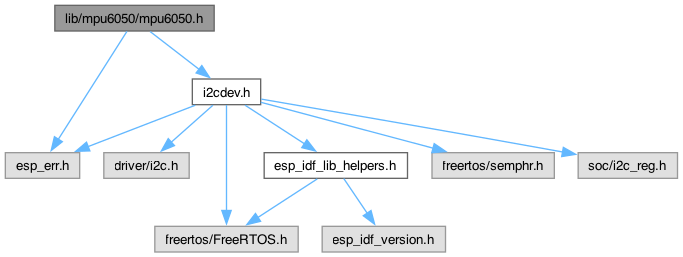
mpu6050.h File Reference
Include dependency graph for mpu6050.h:
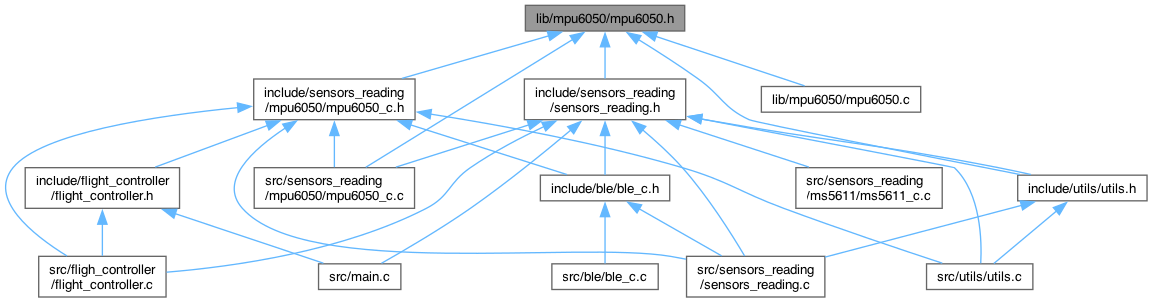
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mpu6050_raw_acceleration_t |
| struct | mpu6050_raw_rotation_t |
| struct | mpu6050_acceleration_t |
| struct | mpu6050_rotation_t |
| struct | mpu6050_dev_t |
Macros | |
| #define | MPU6050_I2C_ADDRESS_LOW (0x68) |
| #define | MPU6050_I2C_ADDRESS_HIGH (0x69) |
Functions | |
| esp_err_t | mpu6050_init_desc (mpu6050_dev_t *dev, uint8_t addr, i2c_port_t port, gpio_num_t sda_gpio, gpio_num_t scl_gpio) |
| Initialize device descriptor. | |
| esp_err_t | mpu6050_free_desc (mpu6050_dev_t *dev) |
| Free device descriptor. | |
| esp_err_t | mpu6050_init (mpu6050_dev_t *dev) |
| Initialize device. | |
| esp_err_t | mpu6050_get_aux_vddio_level (mpu6050_dev_t *dev, mpu6050_vddio_level_t *level) |
| Get the auxiliary I2C supply voltage level. | |
| esp_err_t | mpu6050_set_aux_vddio_level (mpu6050_dev_t *dev, mpu6050_vddio_level_t level) |
| Set the auxiliary I2C supply voltage level. | |
| esp_err_t | mpu6050_get_rate (mpu6050_dev_t *dev, uint8_t *rate) |
| Get gyroscope output rate divider. | |
| esp_err_t | mpu6050_set_rate (mpu6050_dev_t *dev, uint8_t rate) |
| Set gyroscope output rate divider. | |
| esp_err_t | mpu6050_get_external_frame_sync (mpu6050_dev_t *dev, mpu6050_ext_sync_t *sync) |
| Get external FSYNC configuration. | |
| esp_err_t | mpu6050_set_external_frame_sync (mpu6050_dev_t *dev, mpu6050_ext_sync_t sync) |
| Set external FSYNC configuration. | |
| esp_err_t | mpu6050_get_dlpf_mode (mpu6050_dev_t *dev, mpu6050_dlpf_mode_t *mode) |
| Get digital low-pass filter configuration. | |
| esp_err_t | mpu6050_set_dlpf_mode (mpu6050_dev_t *dev, mpu6050_dlpf_mode_t mode) |
| Set digital low-pass filter configuration. | |
| esp_err_t | mpu6050_get_full_scale_gyro_range (mpu6050_dev_t *dev, mpu6050_gyro_range_t *gyro_range) |
| Get full-scale gyroscope range. | |
| esp_err_t | mpu6050_set_full_scale_gyro_range (mpu6050_dev_t *dev, mpu6050_gyro_range_t range) |
| Set full-scale gyroscope range. | |
| esp_err_t | mpu6050_get_accel_self_test_factory_trim (mpu6050_dev_t *dev, mpu6050_axis_t axis, uint8_t *trim) |
| Get self-test factory trim value for accelerometer axis. | |
| esp_err_t | mpu6050_get_gyro_self_test_factory_trim (mpu6050_dev_t *dev, mpu6050_axis_t axis, uint8_t *trim) |
| Get self-test factory trim value for gyroscope axis. | |
| esp_err_t | mpu6050_get_accel_self_test (mpu6050_dev_t *dev, mpu6050_axis_t axis, bool *enabled) |
| Get self-test enabled for accelerometer axis. | |
| esp_err_t | mpu6050_set_accel_self_test (mpu6050_dev_t *dev, mpu6050_axis_t axis, bool enabled) |
| Set self-test enabled for accelerometer axis. | |
| esp_err_t | mpu6050_get_full_scale_accel_range (mpu6050_dev_t *dev, mpu6050_accel_range_t *range) |
| Get full-scale accelerometer range. | |
| esp_err_t | mpu6050_set_full_scale_accel_range (mpu6050_dev_t *dev, mpu6050_accel_range_t range) |
| Set full-scale accelerometer range. | |
| esp_err_t | mpu6050_get_dhpf_mode (mpu6050_dev_t *dev, mpu6050_dhpf_mode_t *mode) |
| Get the high-pass filter configuration. The DHPF is a filter module in the path leading to motion detectors (Free Fall, Motion threshold, and Zero Motion). The high pass filter output is not available to the data registers. | |
| esp_err_t | mpu6050_set_dhpf_mode (mpu6050_dev_t *dev, mpu6050_dhpf_mode_t mode) |
| Set the high-pass filter configuration. | |
| esp_err_t | mpu6050_get_freefall_detection_threshold (mpu6050_dev_t *dev, uint8_t *threshold) |
| Get free-fall event acceleration threshold. | |
| esp_err_t | mpu6050_set_freefall_detection_threshold (mpu6050_dev_t *dev, uint8_t threshold) |
| Get free-fall event acceleration threshold. | |
| esp_err_t | mpu6050_get_freefall_detection_duration (mpu6050_dev_t *dev, uint8_t *duration_ms) |
| Get free-fall event duration threshold. | |
| esp_err_t | mpu6050_set_freefall_detection_duration (mpu6050_dev_t *dev, uint8_t duration_ms) |
| Set free-fall event duration threshold. | |
| esp_err_t | mpu6050_get_motion_detection_threshold (mpu6050_dev_t *dev, uint8_t *threshold) |
| Get motion detection event acceleration threshold. | |
| esp_err_t | mpu6050_set_motion_detection_threshold (mpu6050_dev_t *dev, uint8_t threshold) |
| Set motion detection event acceleration threshold. | |
| esp_err_t | mpu6050_get_motion_detection_duration (mpu6050_dev_t *dev, uint8_t *duration) |
| Get motion detection event duration threshold. | |
| esp_err_t | mpu6050_set_motion_detection_duration (mpu6050_dev_t *dev, uint8_t duration) |
| Set motion detection event duration threshold. | |
| esp_err_t | mpu6050_get_zero_motion_detection_threshold (mpu6050_dev_t *dev, uint8_t *threshold) |
| Get zero motion detection event acceleration threshold. | |
| esp_err_t | mpu6050_set_zero_motion_detection_threshold (mpu6050_dev_t *dev, uint8_t threshold) |
| Set zero motion detection event acceleration threshold. | |
| esp_err_t | mpu6050_get_zero_motion_detection_duration (mpu6050_dev_t *dev, uint8_t *duration) |
| Get zero motion detection event duration threshold. | |
| esp_err_t | mpu6050_set_zero_motion_detection_duration (mpu6050_dev_t *dev, uint8_t duration) |
| Set zero motion detection event duration threshold. | |
| esp_err_t | mpu6050_get_temp_fifo_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get temperature FIFO enabled value. | |
| esp_err_t | mpu6050_set_temp_fifo_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set temperature FIFO enabled value. | |
| esp_err_t | mpu6050_get_gyro_fifo_enabled (mpu6050_dev_t *dev, mpu6050_axis_t axis, bool *enabled) |
| Get gyroscope axis FIFO enabled value. | |
| esp_err_t | mpu6050_set_gyro_fifo_enabled (mpu6050_dev_t *dev, mpu6050_axis_t axis, bool enabled) |
| Set gyroscope axis FIFO enabled value. | |
| esp_err_t | mpu6050_get_accel_fifo_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get accelerometer FIFO enabled value. | |
| esp_err_t | mpu6050_set_accel_fifo_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set accelerometer FIFO enabled value. | |
| esp_err_t | mpu6050_get_slave_fifo_enabled (mpu6050_dev_t *dev, mpu6050_slave_t num, bool *enabled) |
| Get Slave FIFO enabled value. | |
| esp_err_t | mpu6050_set_slave_fifo_enabled (mpu6050_dev_t *dev, mpu6050_slave_t num, bool enabled) |
| Set Slave FIFO enabled value. | |
| esp_err_t | mpu6050_get_multi_master_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get multi-master enabled value. | |
| esp_err_t | mpu6050_set_multi_master_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set multi-master enabled value. | |
| esp_err_t | mpu6050_get_wait_for_external_sensor_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get wait-for-external-sensor-data enabled value. | |
| esp_err_t | mpu6050_set_wait_for_external_sensor_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set wait-for-external-sensor-data enabled value. | |
| esp_err_t | mpu6050_get_slave_read_write_transition_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get slave read/write transition enabled value. | |
| esp_err_t | mpu6050_set_slave_read_write_transition_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set slave read/write transition enabled value. | |
| esp_err_t | mpu6050_get_master_clock_speed (mpu6050_dev_t *dev, mpu6050_i2c_master_clock_t *clk_spd) |
| Get I2C master clock speed. | |
| esp_err_t | mpu6050_set_master_clock_speed (mpu6050_dev_t *dev, mpu6050_i2c_master_clock_t clk_spd) |
| Set I2C master clock speed. | |
| esp_err_t | mpu6050_get_slave_address (mpu6050_dev_t *dev, mpu6050_slave_t num, uint8_t *addr) |
| Get the I2C address of the specified slave. | |
| esp_err_t | mpu6050_set_slave_address (mpu6050_dev_t *dev, mpu6050_slave_t num, uint8_t address) |
| Set the I2C address of the specified slave. | |
| esp_err_t | mpu6050_get_slave_register (mpu6050_dev_t *dev, mpu6050_slave_t num, uint8_t *reg) |
| Get the active internal register for the specified slave. | |
| esp_err_t | mpu6050_set_slave_register (mpu6050_dev_t *dev, mpu6050_slave_t num, uint8_t reg) |
| Set the active internal register for the specified slave. | |
| esp_err_t | mpu6050_get_slave_enabled (mpu6050_dev_t *dev, mpu6050_slave_t num, bool *enabled) |
| Get the enabled value for the specified slave. | |
| esp_err_t | mpu6050_set_slave_enabled (mpu6050_dev_t *dev, mpu6050_slave_t num, bool enabled) |
| Set the enabled value for the specified slave. | |
| esp_err_t | mpu6050_get_slave_word_byte_swap (mpu6050_dev_t *dev, mpu6050_slave_t num, bool *enabled) |
| Get word pair byte-swapping enabled for the specified slave. | |
| esp_err_t | mpu6050_set_slave_word_byte_swap (mpu6050_dev_t *dev, mpu6050_slave_t num, bool enabled) |
| Set word pair byte-swapping enabled for the specified slave. | |
| esp_err_t | mpu6050_get_slave_write_mode (mpu6050_dev_t *dev, mpu6050_slave_t num, bool *mode) |
| Get write mode for the specified slave. | |
| esp_err_t | mpu6050_set_slave_write_mode (mpu6050_dev_t *dev, mpu6050_slave_t num, bool mode) |
| Set write mode for the specified slave. | |
| esp_err_t | mpu6050_get_slave_word_group_offset (mpu6050_dev_t *dev, mpu6050_slave_t num, bool *enabled) |
| Get word pair grouping order offset for the specified slave. | |
| esp_err_t | mpu6050_set_slave_word_group_offset (mpu6050_dev_t *dev, mpu6050_slave_t num, bool enabled) |
| Set word pair grouping order offset for the specified slave. | |
| esp_err_t | mpu6050_get_slave_data_length (mpu6050_dev_t *dev, mpu6050_slave_t num, uint8_t *length) |
| Get number of bytes to read for the specified slave. | |
| esp_err_t | mpu6050_set_slave_data_length (mpu6050_dev_t *dev, mpu6050_slave_t num, uint8_t length) |
| Set number of bytes to read for the specified slave. | |
| esp_err_t | mpu6050_set_slave_4_output_byte (mpu6050_dev_t *dev, uint8_t data) |
| Set new byte to write to Slave 4. This register stores the data to be written into the Slave 4. If I2C_SLV4_RW is set 1 (set to read), this register has no effect. | |
| esp_err_t | mpu6050_get_slave_4_interrupt_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get the enabled value for Slave 4 transaction interrupts. | |
| esp_err_t | mpu6050_set_slave_4_interrupt_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set the enabled value for Slave 4 transaction interrupts. | |
| esp_err_t | mpu6050_get_slave_4_master_delay (mpu6050_dev_t *dev, uint8_t *delay) |
| Get Slave 4 master delay value. | |
| esp_err_t | mpu6050_set_slave_4_master_delay (mpu6050_dev_t *dev, uint8_t delay) |
| Set Slave 4 master delay value. | |
| esp_err_t | mpu6050_get_slave_4_input_byte (mpu6050_dev_t *dev, uint8_t *byte) |
| Get last available byte read from Slave 4. | |
| esp_err_t | mpu6050_get_passthrough_status (mpu6050_dev_t *dev, bool *enabled) |
| Get FSYNC interrupt status. | |
| esp_err_t | mpu6050_get_slave_4_is_done (mpu6050_dev_t *dev, bool *enabled) |
| Get Slave 4 transaction done status. | |
| esp_err_t | mpu6050_get_lost_arbitration (mpu6050_dev_t *dev, bool *lost) |
| Get master arbitration lost status. | |
| esp_err_t | mpu6050_get_slave_nack (mpu6050_dev_t *dev, mpu6050_slave_t num, bool *nack) |
| Get Slave NACK status. | |
| esp_err_t | mpu6050_get_interrupt_mode (mpu6050_dev_t *dev, mpu6050_int_level_t *mode) |
| Get interrupt logic level mode. | |
| esp_err_t | mpu6050_set_interrupt_mode (mpu6050_dev_t *dev, mpu6050_int_level_t mode) |
| Set interrupt logic level mode. | |
| esp_err_t | mpu6050_get_interrupt_drive (mpu6050_dev_t *dev, mpu6050_int_drive_t *drive) |
| Get interrupt drive mode. | |
| esp_err_t | mpu6050_set_interrupt_drive (mpu6050_dev_t *dev, mpu6050_int_drive_t drive) |
| Set interrupt drive mode. | |
| esp_err_t | mpu6050_get_interrupt_latch (mpu6050_dev_t *dev, mpu6050_int_latch_t *latch) |
| Get interrupt latch mode. | |
| esp_err_t | mpu6050_set_interrupt_latch (mpu6050_dev_t *dev, mpu6050_int_latch_t latch) |
| Set interrupt latch mode. | |
| esp_err_t | mpu6050_get_interrupt_latch_clear (mpu6050_dev_t *dev, bool *clear) |
| Get interrupt latch clear mode. | |
| esp_err_t | mpu6050_set_interrupt_latch_clear (mpu6050_dev_t *dev, bool clear) |
| Set interrupt latch clear mode. | |
| esp_err_t | mpu6050_get_fsync_interrupt_level (mpu6050_dev_t *dev, mpu6050_int_level_t *level) |
| Get FSYNC interrupt logic level. | |
| esp_err_t | mpu6050_set_fsync_interrupt_level (mpu6050_dev_t *dev, mpu6050_int_level_t level) |
| Set FSYNC interrupt logic level. | |
| esp_err_t | mpu6050_get_fsync_interrupt_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get FSYNC pin interrupt enabled setting. | |
| esp_err_t | mpu6050_set_fsync_interrupt_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set FSYNC pin interrupt enabled setting. | |
| esp_err_t | mpu6050_get_i2c_bypass_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get I2C bypass enabled status. | |
| esp_err_t | mpu6050_set_i2c_bypass_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set I2C bypass enabled status. | |
| esp_err_t | mpu6050_get_clock_output_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get reference clock output enabled status. | |
| esp_err_t | mpu6050_set_clock_output_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set reference clock output enabled status. | |
| esp_err_t | mpu6050_get_int_enabled (mpu6050_dev_t *dev, uint8_t *ints) |
| Get full interrupt enabled status. | |
| esp_err_t | mpu6050_set_int_enabled (mpu6050_dev_t *dev, uint8_t ints) |
| Set full interrupt enabled status. | |
| esp_err_t | mpu6050_get_int_status (mpu6050_dev_t *dev, uint8_t *ints) |
| Get full set of interrupt status bits. | |
| esp_err_t | mpu6050_get_accel_offset (mpu6050_dev_t *dev, mpu6050_axis_t axis, int16_t *offset) |
| Get offset for accelerometer axis. | |
| esp_err_t | mpu6050_set_accel_offset (mpu6050_dev_t *dev, mpu6050_axis_t axis, int16_t offset) |
| Set offset for accelerometer axis. | |
| esp_err_t | mpu6050_get_gyro_offset (mpu6050_dev_t *dev, mpu6050_axis_t axis, int16_t *offset) |
| Get offset for gyroscope axis. | |
| esp_err_t | mpu6050_set_gyro_offset (mpu6050_dev_t *dev, mpu6050_axis_t axis, int16_t offset) |
| Get offset for gyroscope axis. | |
| esp_err_t | mpu6050_get_acceleration (mpu6050_dev_t *dev, mpu6050_acceleration_t *accel) |
| Get 3-axis accelerometer readings. | |
| esp_err_t | mpu6050_get_raw_acceleration (mpu6050_dev_t *dev, mpu6050_raw_acceleration_t *raw_accel) |
| Get raw 3-axis accelerometer readings. | |
| esp_err_t | mpu6050_get_acceleration_axis (mpu6050_dev_t *dev, mpu6050_axis_t axis, float *accel) |
| Get accelerometer reading on a single axis. | |
| esp_err_t | mpu6050_get_raw_acceleration_axis (mpu6050_dev_t *dev, mpu6050_axis_t axis, int16_t *raw_accel) |
| Get raw accelerometer reading on a single axis. | |
| esp_err_t | mpu6050_get_temperature (mpu6050_dev_t *dev, float *temp) |
| Get current internal temperature. | |
| esp_err_t | mpu6050_get_rotation (mpu6050_dev_t *dev, mpu6050_rotation_t *gyro) |
| Get 3-axis gyroscope readings. | |
| esp_err_t | mpu6050_get_raw_rotation (mpu6050_dev_t *dev, mpu6050_raw_rotation_t *raw_gyro) |
| Get raw 3-axis gyroscope readings. | |
| esp_err_t | mpu6050_get_rotation_axis (mpu6050_dev_t *dev, mpu6050_axis_t axis, float *gyro) |
| Get gyroscope reading on a single axis. | |
| esp_err_t | mpu6050_get_raw_rotation_axis (mpu6050_dev_t *dev, mpu6050_axis_t axis, int16_t *raw_gyro) |
| Get raw gyroscope reading on a single axis. | |
| esp_err_t | mpu6050_get_motion (mpu6050_dev_t *dev, mpu6050_acceleration_t *data_accel, mpu6050_rotation_t *data_gyro) |
| Get raw 6-axis motion sensor readings (accel/gyro). | |
| esp_err_t | mpu6050_get_external_sensor_data (mpu6050_dev_t *dev, int position, void *buf, size_t length) |
| Read bytes from external sensor data register. | |
| esp_err_t | mpu6050_get_motion_status (mpu6050_dev_t *dev, uint8_t *status) |
| Get full motion detection status register content (all bits). | |
| esp_err_t | mpu6050_set_slave_output_byte (mpu6050_dev_t *dev, mpu6050_slave_t num, uint8_t data) |
| Write byte to Data Output container for specified slave. | |
| esp_err_t | mpu6050_get_external_shadow_delay_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get external data shadow delay enabled status. | |
| esp_err_t | mpu6050_set_external_shadow_delay_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set external data shadow delay enabled status. | |
| esp_err_t | mpu6050_get_slave_delay_enabled (mpu6050_dev_t *dev, mpu6050_slave_t num, bool *enabled) |
| Get slave delay enabled status. | |
| esp_err_t | mpu6050_set_slave_delay_enabled (mpu6050_dev_t *dev, mpu6050_slave_t num, bool enabled) |
| Set slave delay enabled status. | |
| esp_err_t | mpu6050_reset_gyroscope_path (mpu6050_dev_t *dev) |
| Reset gyroscope signal path. | |
| esp_err_t | mpu6050_reset_accelerometer_path (mpu6050_dev_t *dev) |
| Reset accelerometer signal path. | |
| esp_err_t | mpu6050_reset_temperature_path (mpu6050_dev_t *dev) |
| Reset temperature sensor signal path. | |
| esp_err_t | mpu6050_get_accelerometer_power_on_delay (mpu6050_dev_t *dev, uint8_t *delay) |
| Get accelerometer power-on delay. | |
| esp_err_t | mpu6050_set_accelerometer_power_on_delay (mpu6050_dev_t *dev, uint8_t delay) |
| Set accelerometer power-on delay. | |
| esp_err_t | mpu6050_get_freefall_detection_counter_decrement (mpu6050_dev_t *dev, uint8_t *decrement) |
| Get Free Fall detection counter decrement configuration. | |
| esp_err_t | mpu6050_set_freefall_detection_counter_decrement (mpu6050_dev_t *dev, uint8_t decrement) |
| Set Free Fall detection counter decrement configuration. | |
| esp_err_t | mpu6050_get_motion_detection_counter_decrement (mpu6050_dev_t *dev, uint8_t *decrement) |
| Get Motion detection counter decrement configuration. | |
| esp_err_t | mpu6050_set_motion_detection_counter_decrement (mpu6050_dev_t *dev, uint8_t decrement) |
| Set Motion detection counter decrement configuration. | |
| esp_err_t | mpu6050_get_fifo_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get FIFO enabled status. | |
| esp_err_t | mpu6050_set_fifo_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set FIFO enabled status. | |
| esp_err_t | mpu6050_get_i2c_master_mode_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get I2C Master Mode enabled status. | |
| esp_err_t | mpu6050_set_i2c_master_mode_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set I2C Master Mode enabled status. | |
| esp_err_t | mpu6050_switch_spie_enabled (mpu6050_dev_t *dev, bool enabled) |
| Switch from I2C to SPI mode (MPU-6000 only). | |
| esp_err_t | mpu6050_reset_fifo (mpu6050_dev_t *dev) |
| Reset the FIFO. | |
| esp_err_t | mpu6050_reset_sensors (mpu6050_dev_t *dev) |
| Reset all sensor registers and signal paths. | |
| esp_err_t | mpu6050_reset (mpu6050_dev_t *dev) |
| Trigger a full device reset. | |
| esp_err_t | mpu6050_get_sleep_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get sleep mode status. | |
| esp_err_t | mpu6050_set_sleep_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set sleep mode status. | |
| esp_err_t | mpu6050_get_wake_cycle_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get wake cycle enabled status. | |
| esp_err_t | mpu6050_set_wake_cycle_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set wake cycle enabled status. | |
| esp_err_t | mpu6050_get_temp_sensor_enabled (mpu6050_dev_t *dev, bool *enabled) |
| Get temperature sensor enabled status. | |
| esp_err_t | mpu6050_set_temp_sensor_enabled (mpu6050_dev_t *dev, bool enabled) |
| Set temperature sensor enabled status. | |
| esp_err_t | mpu6050_get_clock_source (mpu6050_dev_t *dev, mpu6050_clock_source_t *source) |
| Get clock source setting. | |
| esp_err_t | mpu6050_set_clock_source (mpu6050_dev_t *dev, mpu6050_clock_source_t source) |
| Set clock source setting. | |
| esp_err_t | mpu6050_get_wake_frequency (mpu6050_dev_t *dev, mpu6050_wake_freq_t *frequency) |
| Get wake frequency in Accel-Only Low Power Mode. | |
| esp_err_t | mpu6050_set_wake_frequency (mpu6050_dev_t *dev, mpu6050_wake_freq_t frequency) |
| Set wake frequency in Accel-Only Low Power Mode. | |
| esp_err_t | mpu6050_get_standby_accel_enabled (mpu6050_dev_t *dev, mpu6050_axis_t axis, bool *enabled) |
| Get accelerometer axis standby enabled status. | |
| esp_err_t | mpu6050_set_standby_accel_enabled (mpu6050_dev_t *dev, mpu6050_axis_t axis, bool enabled) |
| Set accelerometer axis standby enabled status. | |
| esp_err_t | mpu6050_get_standby_gyro_enabled (mpu6050_dev_t *dev, mpu6050_axis_t axis, bool *enabled) |
| Get gyroscope axis standby enabled status. | |
| esp_err_t | mpu6050_set_standby_gyro_enabled (mpu6050_dev_t *dev, mpu6050_axis_t axis, bool enabled) |
| Set gyroscope axis standby enabled status. | |
| esp_err_t | mpu6050_get_fifo_count (mpu6050_dev_t *dev, uint16_t *count) |
| Get current FIFO buffer size. | |
| esp_err_t | mpu6050_get_fifo_byte (mpu6050_dev_t *dev, uint8_t *data) |
| Get byte from FIFO buffer. | |
| esp_err_t | mpu6050_get_fifo_bytes (mpu6050_dev_t *dev, uint8_t *data, size_t length) |
| Get bytes from FIFO buffer. | |
| esp_err_t | mpu6050_set_fifo_byte (mpu6050_dev_t *dev, uint8_t data) |
| Write byte to FIFO buffer. | |
| esp_err_t | mpu6050_get_device_id (mpu6050_dev_t *dev, uint8_t *id) |
| Get the ID of the device. | |
| esp_err_t | mpu6050_calibrate (mpu6050_dev_t *dev, float *accel_bias_res, float *gyro_bias_res) |
| Function which accumulates gyro and accelerometer data after device initialization. | |
| esp_err_t | mpu6050_self_test (mpu6050_dev_t *dev, float *destination) |
| Accelerometer and gyroscope self test. | |