mpu6050_c.c File Reference
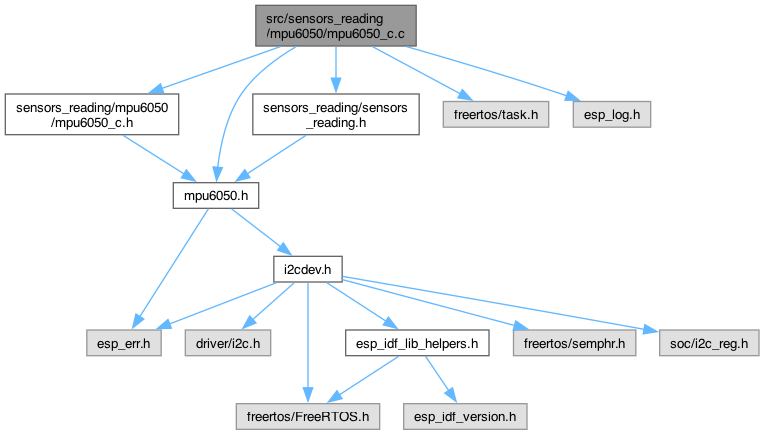
#include "sensors_reading/mpu6050/mpu6050_c.h"#include "mpu6050.h"#include "sensors_reading/sensors_reading.h"#include "freertos/task.h"#include <esp_log.h>
Include dependency graph for mpu6050_c.c:
Functions | |
| esp_err_t | mpu6050_c_init (mpu6050_dev_t *dev) |
| Initialize MPU6050 descriptor for reading acceleration. | |
| void | mpu6050_c_read (mpu6050_dev_t *dev, mpu6050_acceleration_t *accel, mpu6050_rotation_t *rot) |
| Read data from MPU6050 and store linear acceleration (m/s^2) and angular acceleration (º/s^2). | |
Function Documentation
◆ mpu6050_c_init()
| esp_err_t mpu6050_c_init | ( | mpu6050_dev_t * | dev | ) |
Initialize MPU6050 descriptor for reading acceleration.
- Parameters
-
dev pointer where the descriptor will be stored.
- Returns
- esp_err_t ESP_OK if success.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ mpu6050_c_read()
| void mpu6050_c_read | ( | mpu6050_dev_t * | dev, |
| mpu6050_acceleration_t * | accel, | ||
| mpu6050_rotation_t * | rot ) |
Read data from MPU6050 and store linear acceleration (m/s^2) and angular acceleration (º/s^2).
- Parameters
-
dev pointer to the MPU6050 device descriptor. accel pointer where the linear acceleration readings will be stored (m/s^2). rot pointer where the angular acceleration readings will be stored (º/s^2).
Here is the call graph for this function:

Here is the caller graph for this function:
