#include "esp_err.h"#include "esp_gatts_api.h"#include "sensors_reading/mpu6050/mpu6050_c.h"#include "sensors_reading/sensors_reading.h"#include <stdint.h>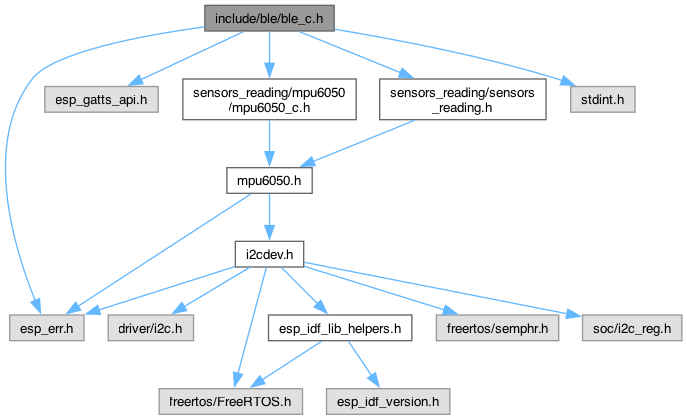
Go to the source code of this file.
Macros | |
| #define | LO_UINT16(a) |
| #define | HI_UINT16(a) |
| #define | GATTS_SERVICE_UUID 0x00FF |
| #define | GATTS_CHAR_UUID_ROCKET_STATUS 0xFF01 |
| #define | GATTS_CHAR_UUID_ROCKET_ALTITUDE 0xFF02 |
| #define | GATTS_CHAR_UUID_ROCKET_SPEED 0xFF03 |
| #define | GATTS_CHAR_UUID_ROCKET_PRESSURE 0xFF04 |
| #define | GATTS_CHAR_UUID_ROCKET_TEMPERATURE 0xFF05 |
| #define | GATTS_CHAR_UUID_ROCKET_ACC_X 0xFF06 |
| #define | GATTS_CHAR_UUID_ROCKET_ACC_Y 0xFF07 |
| #define | GATTS_CHAR_UUID_ROCKET_ACC_Z 0xFF08 |
| #define | GATTS_CHAR_UUID_ROCKET_ROT_X 0xFF09 |
| #define | GATTS_CHAR_UUID_ROCKET_ROT_Y 0xFF10 |
| #define | GATTS_CHAR_UUID_ROCKET_ROT_Z 0xFF11 |
| #define | GATTS_NUM_HANDLE 25 |
| #define | TAG_BLE "BLE" |
Functions | |
| esp_err_t | ble_init (void) |
| Initializes BLE application with all the needed drivers and components. | |
| void | ble_gatts_event_handler (esp_gatts_cb_event_t event, esp_gatt_if_t gatts_if, esp_ble_gatts_cb_param_t *param) |
| Callback function for GATT services. | |
| void | create_and_add_service (void) |
| Create a and add service object. | |
| void | crete_characteristics (void) |
| Create the characteristic. | |
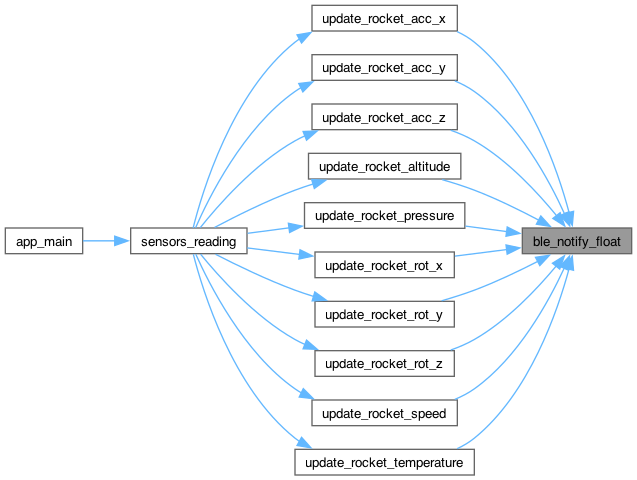
| esp_err_t | ble_notify_float (float value, uint16_t char_handler) |
| Notify a float value. | |
| esp_err_t | ble_notify_uint8 (uint8_t value, uint16_t char_handler) |
| Notify a uint8_t value. | |
| esp_err_t | update_rocket_status (int value) |
| Notify rocket status over BLE. | |
| esp_err_t | update_rocket_altitude (float value) |
| Notify altitude over BLE. | |
| esp_err_t | update_rocket_speed (float value) |
| Notify speed over BLE. | |
| esp_err_t | update_rocket_pressure (int32_t value) |
| Notify pressure over BLE. | |
| esp_err_t | update_rocket_temperature (float value) |
| Notify temperature over BLE. | |
| esp_err_t | update_rocket_acc_x (float value) |
| Notify new X-axis linear acceleration. | |
| esp_err_t | update_rocket_acc_y (float value) |
| Notify new Y-axis linear acceleration. | |
| esp_err_t | update_rocket_acc_z (float value) |
| Notify new Z-axis linear acceleration. | |
| esp_err_t | update_rocket_rot_x (float value) |
| Notify new X-axis angular acceleration. | |
| esp_err_t | update_rocket_rot_y (float value) |
| Notify new Y-axis angular acceleration. | |
| esp_err_t | update_rocket_rot_z (float value) |
| Notify new Z-axis angular acceleration. | |
Variables | |
| ROCKET_STATUS_T | rocket_status |
| mpu6050_acceleration_t | rocket_accel |
| mpu6050_rotation_t | rocket_rot |
| float | rocket_temperature |
| float | rocket_altitude |
| int32_t | rocket_pressure |
Macro Definition Documentation
◆ GATTS_CHAR_UUID_ROCKET_ACC_X
| #define GATTS_CHAR_UUID_ROCKET_ACC_X 0xFF06 |
◆ GATTS_CHAR_UUID_ROCKET_ACC_Y
| #define GATTS_CHAR_UUID_ROCKET_ACC_Y 0xFF07 |
◆ GATTS_CHAR_UUID_ROCKET_ACC_Z
| #define GATTS_CHAR_UUID_ROCKET_ACC_Z 0xFF08 |
◆ GATTS_CHAR_UUID_ROCKET_ALTITUDE
| #define GATTS_CHAR_UUID_ROCKET_ALTITUDE 0xFF02 |
◆ GATTS_CHAR_UUID_ROCKET_PRESSURE
| #define GATTS_CHAR_UUID_ROCKET_PRESSURE 0xFF04 |
◆ GATTS_CHAR_UUID_ROCKET_ROT_X
| #define GATTS_CHAR_UUID_ROCKET_ROT_X 0xFF09 |
◆ GATTS_CHAR_UUID_ROCKET_ROT_Y
| #define GATTS_CHAR_UUID_ROCKET_ROT_Y 0xFF10 |
◆ GATTS_CHAR_UUID_ROCKET_ROT_Z
| #define GATTS_CHAR_UUID_ROCKET_ROT_Z 0xFF11 |
◆ GATTS_CHAR_UUID_ROCKET_SPEED
| #define GATTS_CHAR_UUID_ROCKET_SPEED 0xFF03 |
◆ GATTS_CHAR_UUID_ROCKET_STATUS
| #define GATTS_CHAR_UUID_ROCKET_STATUS 0xFF01 |
◆ GATTS_CHAR_UUID_ROCKET_TEMPERATURE
| #define GATTS_CHAR_UUID_ROCKET_TEMPERATURE 0xFF05 |
◆ GATTS_NUM_HANDLE
| #define GATTS_NUM_HANDLE 25 |
◆ GATTS_SERVICE_UUID
| #define GATTS_SERVICE_UUID 0x00FF |
◆ HI_UINT16
| #define HI_UINT16 | ( | a | ) |
◆ LO_UINT16
| #define LO_UINT16 | ( | a | ) |
◆ TAG_BLE
| #define TAG_BLE "BLE" |
Function Documentation
◆ ble_gatts_event_handler()
| void ble_gatts_event_handler | ( | esp_gatts_cb_event_t | event, |
| esp_gatt_if_t | gatts_if, | ||
| esp_ble_gatts_cb_param_t * | param ) |
Callback function for GATT services.
- Parameters
-
event gatts_if param


◆ ble_init()
| esp_err_t ble_init | ( | void | ) |
Initializes BLE application with all the needed drivers and components.
- Returns
- esp_err_t ESP_OK if success.
< Starting number of error codes
< NVS partition doesn't contain any empty pages. This may happen if NVS partition was truncated. Erase the whole partition and call nvs_flash_init again.
< Starting number of error codes
< NVS partition contains data in new format and cannot be recognized by this version of code
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)


◆ ble_notify_float()
| esp_err_t ble_notify_float | ( | float | value, |
| uint16_t | char_handler ) |
Notify a float value.
- Parameters
-
value char_handler
- Returns
- esp_err_t
< Generic esp_err_t code indicating failure
◆ ble_notify_uint8()
| esp_err_t ble_notify_uint8 | ( | uint8_t | value, |
| uint16_t | char_handler ) |
Notify a uint8_t value.
- Parameters
-
value char_handler
- Returns
- esp_err_t
< Generic esp_err_t code indicating failure

◆ create_and_add_service()
| void create_and_add_service | ( | void | ) |
Create a and add service object.
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)

◆ crete_characteristics()
| void crete_characteristics | ( | void | ) |
Create the characteristic.


◆ update_rocket_acc_x()
| esp_err_t update_rocket_acc_x | ( | float | value | ) |
Notify new X-axis linear acceleration.
- Parameters
-
value new X-axis linear acceleration value.
- Returns
- esp_err_t ESP_OK if success.


◆ update_rocket_acc_y()
| esp_err_t update_rocket_acc_y | ( | float | value | ) |
Notify new Y-axis linear acceleration.
- Parameters
-
value new Y-axis linear acceleration value.
- Returns
- esp_err_t ESP_OK if success.


◆ update_rocket_acc_z()
| esp_err_t update_rocket_acc_z | ( | float | value | ) |
Notify new Z-axis linear acceleration.
- Parameters
-
value new Z-axis linear acceleration value.
- Returns
- esp_err_t ESP_OK if success.


◆ update_rocket_altitude()
| esp_err_t update_rocket_altitude | ( | float | value | ) |
Notify altitude over BLE.
- Parameters
-
value new altitude value.
- Returns
- esp_err_t


◆ update_rocket_pressure()
| esp_err_t update_rocket_pressure | ( | int32_t | value | ) |
Notify pressure over BLE.
- Parameters
-
value new pressure value.
- Returns
- esp_err_t ESP_OK if success.


◆ update_rocket_rot_x()
| esp_err_t update_rocket_rot_x | ( | float | value | ) |
Notify new X-axis angular acceleration.
- Parameters
-
value new X-axis angular acceleration value.
- Returns
- esp_err_t ESP_OK if success.


◆ update_rocket_rot_y()
| esp_err_t update_rocket_rot_y | ( | float | value | ) |
Notify new Y-axis angular acceleration.
- Parameters
-
value new Y-axis angular acceleration value.
- Returns
- esp_err_t ESP_OK if success.


◆ update_rocket_rot_z()
| esp_err_t update_rocket_rot_z | ( | float | value | ) |
Notify new Z-axis angular acceleration.
- Parameters
-
value new Z-axis angular acceleration value.
- Returns
- esp_err_t ESP_OK if success.


◆ update_rocket_speed()
| esp_err_t update_rocket_speed | ( | float | value | ) |
Notify speed over BLE.
- Parameters
-
value new rocket speed value.
- Returns
- esp_err_t ESP_OK if success.


◆ update_rocket_status()
| esp_err_t update_rocket_status | ( | int | value | ) |
Notify rocket status over BLE.
- Parameters
-
value new rocket status.
- Returns
- esp_err_t ESP_OK if success.


◆ update_rocket_temperature()
| esp_err_t update_rocket_temperature | ( | float | value | ) |
Notify temperature over BLE.
- Parameters
-
value new temperature value.
- Returns
- esp_err_t ESP_OK if success.


Variable Documentation
◆ rocket_accel
|
extern |
◆ rocket_altitude
| float rocket_altitude |
◆ rocket_pressure
|
extern |
◆ rocket_rot
|
extern |
◆ rocket_status
|
extern |
◆ rocket_temperature
|
extern |