ms5611_c.c File Reference
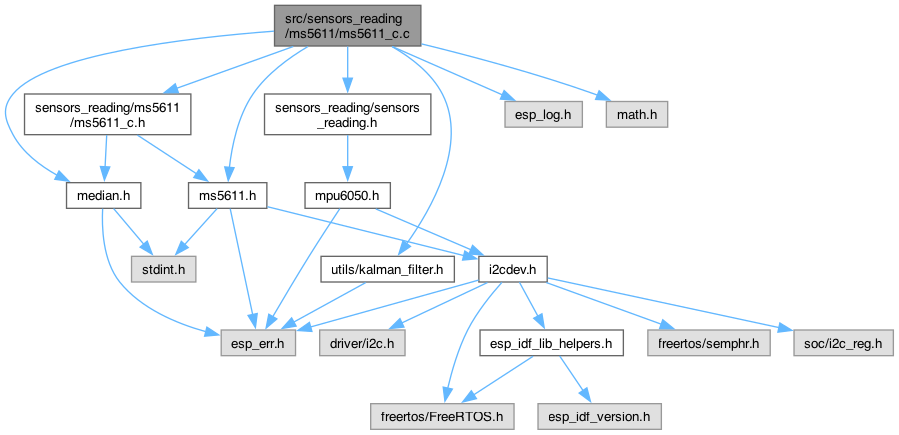
#include "sensors_reading/ms5611/ms5611_c.h"#include "median.h"#include "ms5611.h"#include "sensors_reading/sensors_reading.h"#include "utils/kalman_filter.h"#include <esp_log.h>#include <math.h>
Include dependency graph for ms5611_c.c:
Functions | |
| esp_err_t | ms5611_c_init (ms5611_t *dev) |
| Initialize MS5611 descriptor for pressure and temperature readings. | |
| void | ms5611_read_pressure_temperature_and_altitude (ms5611_t *dev, int32_t *pressure, float *temperature, float *altitude) |
| Read data from MS5611 and store pressure (Pa), temperature (ºC) and altitude (m) from sea level. | |
Variables | |
| static median_filter_int_t | ms5611_prs_filter |
| static int32_t | ms5611_prs_raw_buf [50] |
| static int | ms5611_prs_sorted_idx [50] |
| static median_filter_float_t | ms5611_tmp_filter |
| static float | ms5611_tmp_raw_buf [50] |
| static int | ms5611_tmp_sorted_idx [50] |
| static kalman1d_t | kf_pressure |
| static kalman1d_t | kf_temperature |
Function Documentation
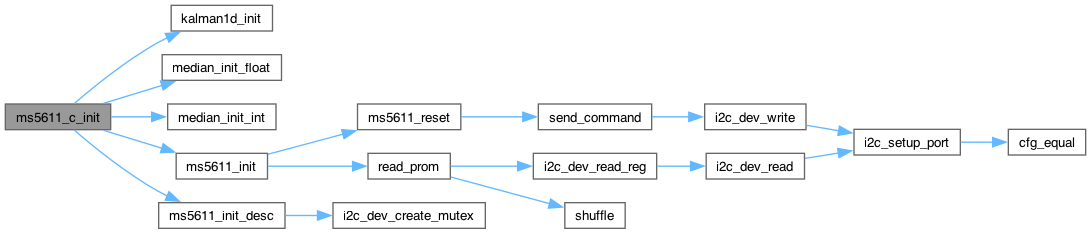
◆ ms5611_c_init()
| esp_err_t ms5611_c_init | ( | ms5611_t * | dev | ) |
Initialize MS5611 descriptor for pressure and temperature readings.
- Parameters
-
dev pointer where the descriptor will be stored.
- Returns
- esp_err_t ESP_OK if success.
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)
< esp_err_t value indicating success (no error)
Here is the call graph for this function:
Here is the caller graph for this function:

◆ ms5611_read_pressure_temperature_and_altitude()
| void ms5611_read_pressure_temperature_and_altitude | ( | ms5611_t * | dev, |
| int32_t * | pressure, | ||
| float * | temperature, | ||
| float * | altitude ) |
Read data from MS5611 and store pressure (Pa), temperature (ºC) and altitude (m) from sea level.
- Parameters
-
dev pointer to MS5611 device descriptor. pressure pointer where pressure reading will be stored (Pa). temperature pointer where temperature reading will be stored (ºC). altitude pointer where altitude estimation will be stored (m).
< esp_err_t value indicating success (no error)
Here is the call graph for this function:

Here is the caller graph for this function:

Variable Documentation
◆ kf_pressure
|
static |
◆ kf_temperature
|
static |
◆ ms5611_prs_filter
|
static |
◆ ms5611_prs_raw_buf
|
static |
◆ ms5611_prs_sorted_idx
|
static |
◆ ms5611_tmp_filter
|
static |
◆ ms5611_tmp_raw_buf
|
static |
◆ ms5611_tmp_sorted_idx
|
static |